Experimenting with leipzig.js for interlinear gloss
One of the key features of my language learning app Hedghog is the display of source text with interlinear gloss. This is of huge benefit in understanding highly-inflected languages. Right now I’m playing around with different ways of achieving this sort of display. I stumbled on leipzig.js which is a library for formatting interlinear gloss according to the Leipzig Rules.
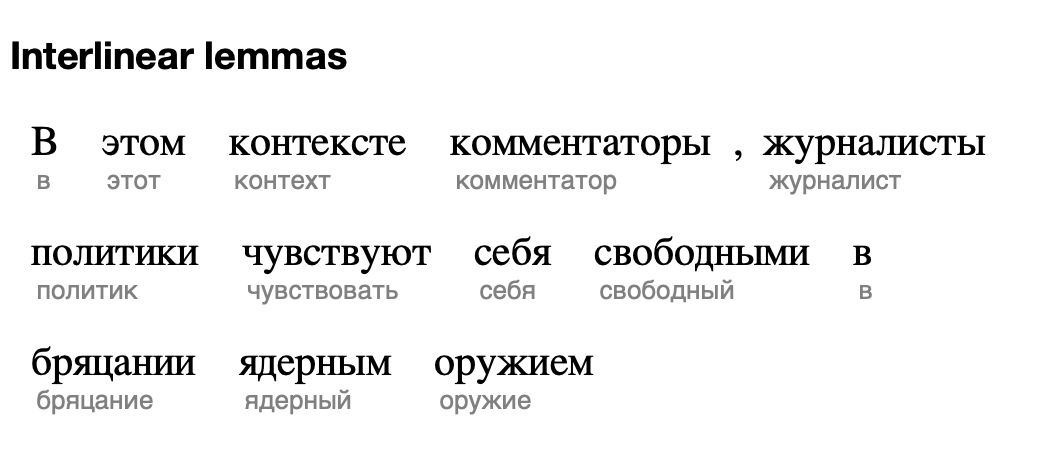
I like what I see, but my first inclination is to get under the hood and fix some of the CSS. For example, the original text is displayed in italic. This is fine, and it may be the convention in linguistics circles, but some Russian letters are a little confusing to Russian learners when displayed in oblique type. It’s not difficult to fix.
Here’s what it looks like:
I just needed to apply some of my own CSS to achieve the desired appearance - Leizig Rules or not.
.gloss__line--0 {
font-family: "Georgia";
font-size: 20px;
}
.gloss__line--1 {
color: gray;
}
.gloss__word .gloss__line:first-child {
font-style: normal !important;
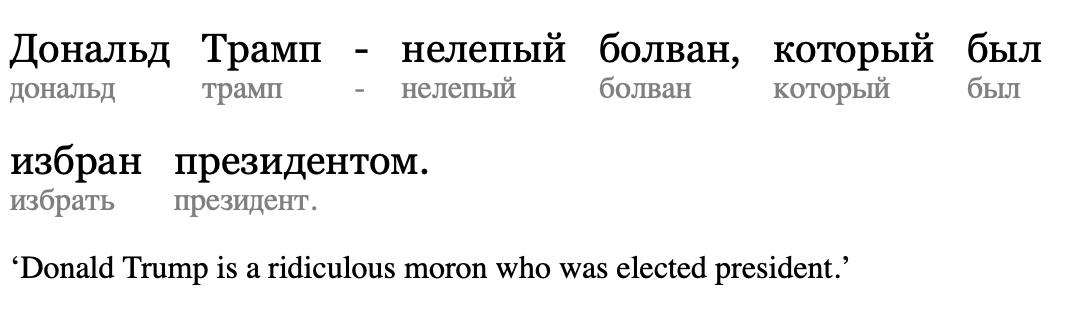
}And the minimal example in Russian:
<html>
<head>
<link rel="stylesheet" href="//cdn.jsdelivr.net/npm/leipzig@latest/dist/leipzig.min.css">
</head>
<body>
<div data-gloss>
<p>Дональд Трамп - нелепый болван, который был избран президентом.</p>
<p>дональд трамп - нелепый болван который был избрать президент.</p>
<p>‘Donald Trump is a ridiculous moron who was elected president.’</p>
</div>
<script src="//cdn.jsdelivr.net/npm/leipzig@latest/dist/leipzig.min.js"></script>
<script>
document.addEventListener('DOMContentLoaded', function() {
var glosser = Leipzig();
glosser.gloss();
});
</script>
</body>
</html>This minimal example as a JSFiddle